Demon Soul F4
Description
Derived from REVO, has inverters for SBUS and SPORT, only one full-fledged UART3 broken out.
MCU, Sensors and Features
Hardware
- MCU: STM32F405
- IMU: MPU-6000
- Motor outputs: 4
- IMU Interrupt:
- BARO: No
- VCP: Yes
- Hardware UARTS: UART1 for SBUS with Rx only, UART6 for SPORT, UART3 available for general use
- OSD: No
- Blackbox: SPI 2MB
- PPM/UART Shared: Yes
- Battery Voltage Sensor: Yes
- Integrated Voltage Regulator: No
- Brushed Motor Mosfets: No
- Buttons: No
Features
SmartPort telemetry inversion. This board uses the following schematic to perform SmartPort inversion and split the signal into Rx and Tx components:

To set SmartPort up correctly, connect corresponding wire from your receiver to the pad labeled S.Port on the FC, then head into CLI and type:
set tlm_inverted = off
set tlm_halfduplex = off
save
Don't forget to enable SmartPort telemetry feature for UART6 (3rd UART on the Ports tab).
Manufacturers and Distributors
http://demonrc.eu/product/demon-soul-f4-high-performance-flight-controller/
Designers
Adam Tusk (?)
Maintainers
Andrey Mironov (@DieHertz)
Similar Targets
REVO F4
FAQ & Known Issues
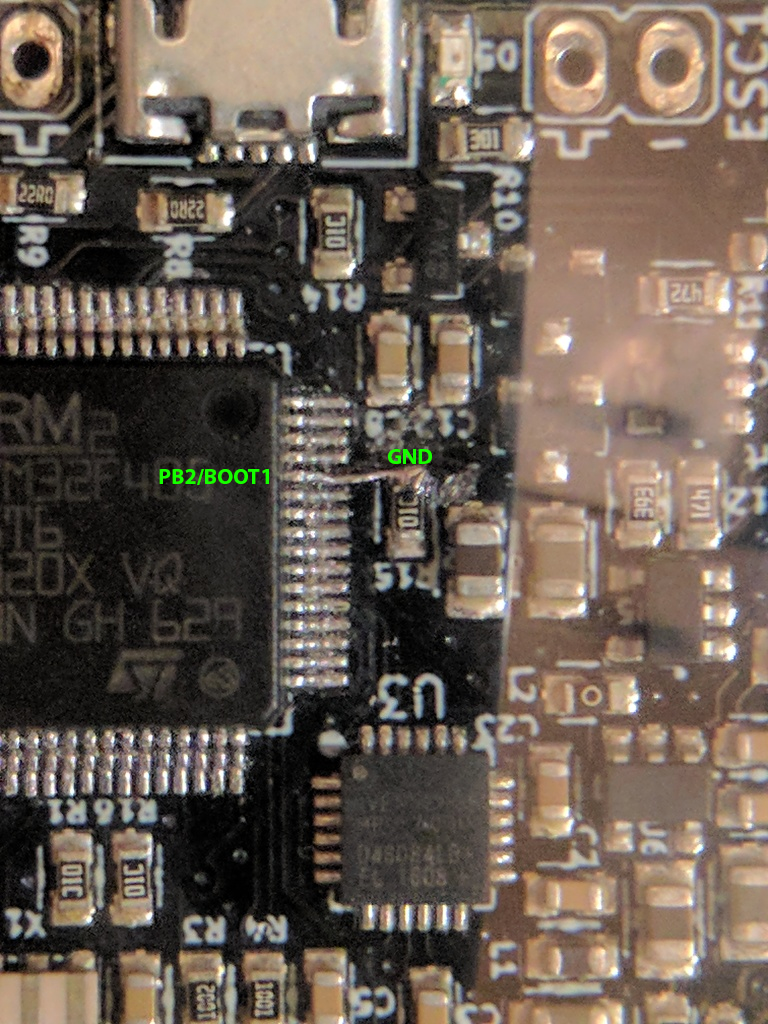
- PB2/BOOT1 pin is not grounded on this board (with gratitude to Dominic Clifton aka hydra for pointing this out!), therefore it may refuse to go into DFU mode even with the boot pads shorted. You can solve this issue by running a small jumper wire from PB2 to GND like shown in the image below.
- SWD connector pinout: GND SWCLK SWD NRST VDD
Image

