CrazyBee F4 FR Pro
Description
CrazyBee F4 FR Pro flight controller is a Highly integrated board(Receiver/4in1 ESC/OSD/Current Sensor) for 1~2S Whoop brushless racing drone.
MCU, Sensors and Features
Hardware and Features
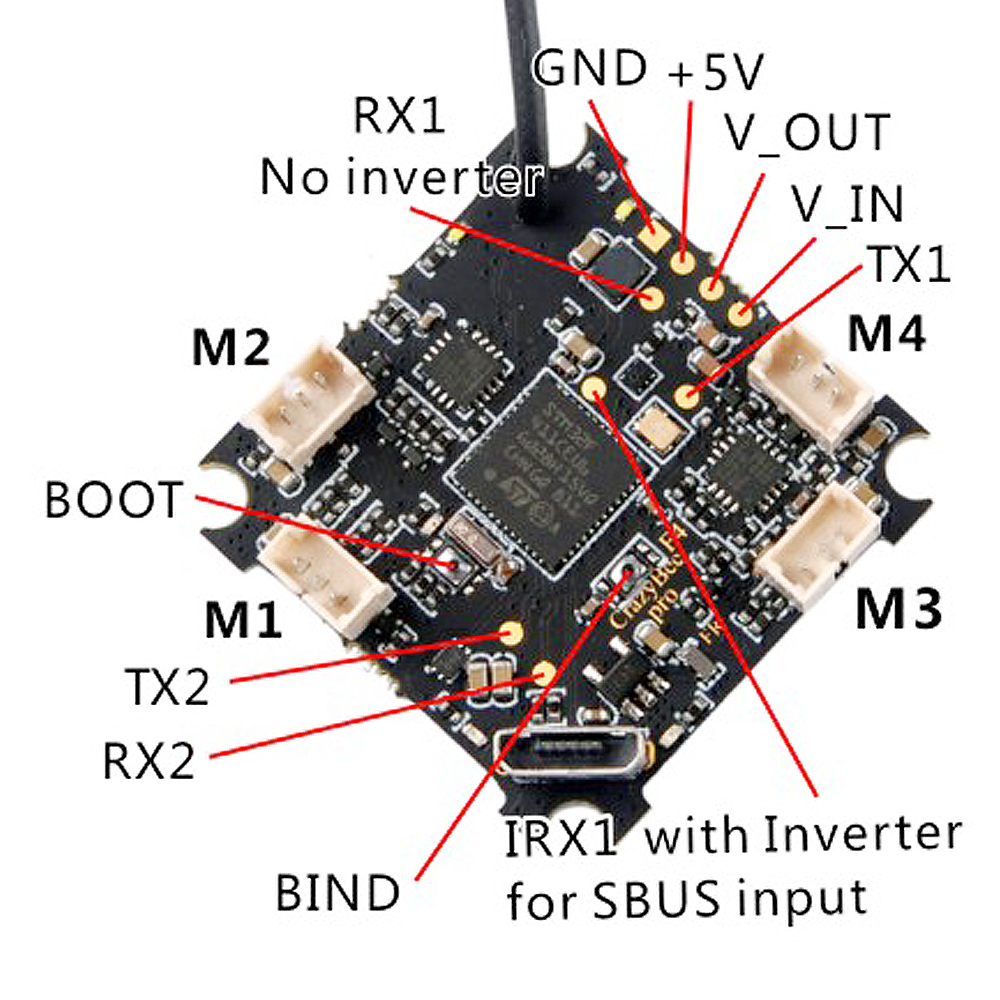
- MCU: STM32F411CEU6 (100MHZ, 512K FLASH)
- IMU: MPU6000 (SPI)
- OSD: Betaflight OSD
- Battery Voltage Sensor: yes
- Power supply: 1-2S battery input (DC 3.5-8.7V)
- Built-in 5V 1A Buck / Boost with LC filter
- Integrated Current sensor:Max 28A,Current meter scale set to 1175
- Built-in SPI FrSky receiver with telemetry(D8/D16 switchable)
- Integrated inverter for sbus(when use external rx) in UART1 RX
- Integrated 4x Blheli_s ESC: Max 5A per ESC(EMF8BB21F16G)
- ESC Connector: 3-pin, PicoBlade 1.25mm pitch
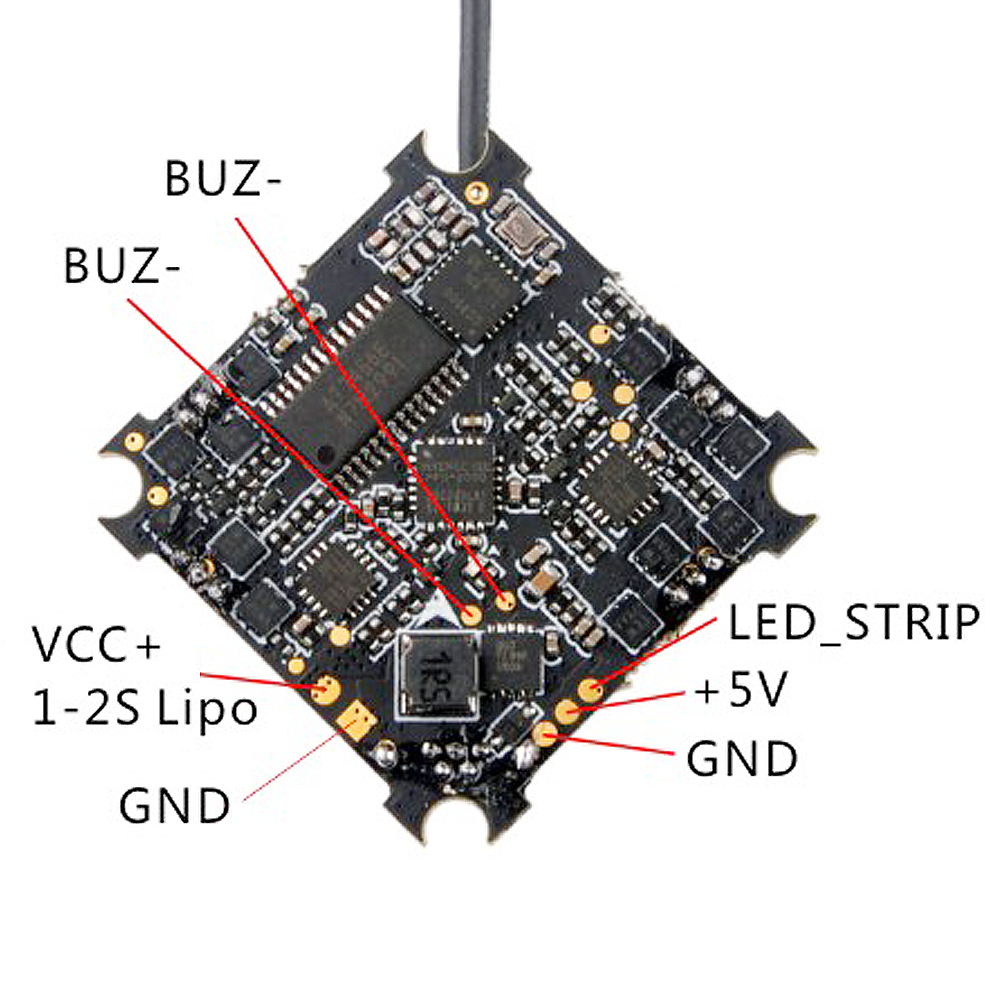
- Beeper output: 2-pin, soldering pad
- 4 Rx Indicating LEDs: 2 x red and 2 x white
- Board size: 28.5 * 28.5mm
Resource mapping
| Label | Pin | Timer | DMA | Default | Note |
|---|---|---|---|---|---|
| MPU6000_INT_EXTI | PA1 | ||||
| MPU6000_CS_PIN | PA4 | SPI1 | |||
| MPU6000_SCK_PIN | PA5 | SPI1 | |||
| MPU6000_MISO_PIN | PA6 | SPI1 | |||
| MPU6000_MOSI_PIN | PA7 | SPI1 | |||
| OSD_CS_PIN | PB12 | SPI2 | |||
| OSD_SCK_PIN | PB13 | SPI2 | |||
| OSD_MISO_PIN | PB14 | SPI2 | |||
| OSD_MOSI_PIN | PB15 | SPI2 | |||
| RX_CS_PIN | PA15 | SPI3 | |||
| RX_SCK_PIN | PB3 | SPI3 | |||
| RX_MISO_PIN | PB4 | SPI3 | |||
| RX_MOSI_PIN | PB5 | SPI3 | |||
| RX_GDO0_PIN | PC14 | ||||
| BIND_PLUG_PIN | PB2 | ||||
| RX_LED_PIN | PB9 | ||||
| PWM1 | PB8 | TIM2, CH3 | |||
| PWM2 | PB9 | TIM4, CH1 | |||
| PWM3 | PA3 | TIM4, CH2 | |||
| PWM4 | PA2 | TIM4, CH3 | |||
| VBAT_ADC_PIN | PB0 | ADC1 | |||
| CURRENT_ADC_PIN | PB1 | ADC1 | |||
| BEEPER | PC15 | ||||
| UART1 TX | PA9 | ||||
| UART1 RX | PA10 | ||||
| UART2 TX | PA2 | ||||
| UART2 RX | PA3 |
Manufacturers and Distributors
- Manufacturers: http://www.happymodel.cn/
- Distributors: Will add soon...
Designers
Maintainers
FAQ & Known Issues
FRSKY Version:
- To bind to your Taranis, you need to be running the non-eu OpenTX version, which allows you to use the required D8 setting to bind to the RX. The factory default BF receiver mode is FRSKY_X, so remember to configure this if needed.
- FrSky X (8 / 16 channels) and FrSky D (8 channels) work both reliably, including in combination with crash flip / DShot beacon, as long as the TELEMETRY feature is disabled; Basic telemetry information like RSSI and battery voltage will be sent even when the TELEMETRY feature is disabled;
- On FrSky D, the TELEMETRY feature causes occasional dropouts, depending on how many sensors (BARO, GPS, ...) are enabled, probably due to a timing overrun;
- On FrSky X, the TELEMETRY feature causes hard lockups due to a bug in the telemetry generation code.